SPERIMENTAZIONE SVOLTA IN COLLABORAZIONE TRA FINCANTIERI S.p.A., DIPARTIMENTO DI INGEGNERIA DELL’UNIVERSITA’ DI FERRARA, TECHNO S.r.l. e PETTENATI E TURCHETTO ( Servizio Chimico di Porto e HSE)
In seguito alla richiesta di collaborazione scientifica tra Università di Ferrara e FINCANTIERI S.p.A. proposta dall’Ing. Paolo Russo, docente di Topografia e Cartografia presso il Dipartimento di Ingegneria dell’Università di Ferrara, il giorno 6 maggio 2016 è stata svolta una sperimentazione presso il grande bacino di carenaggio della stessa Società a Trieste. Del team di esperti che hanno partecipato all’esperienza, oltre al personale tecnico messo a disposizione da Fincantieri, facevano parte Paolo Russo, con funzioni di coordinatore delle operazioni, i piloti Elena Zambello, Valentina Russo, Riccardo Bonora, collaboratori dell’Università, e Roberto Nicolucci ( Techno srl) e Alessandro Turchetto (Servizio Chimico di Porto e HSE).

La sperimentazione aveva i seguenti obiettivi:
- Rilevamento geometrico del bacino di carenaggio mediante aerofotogrammetria da APR;
- Video-ispezione in quota di alcune significative infrastrutture presenti in prossimità del bacino;
- Test del drone equipaggiato con un dispositivo per il prelievo di campioni di acqua e del drone dotato di sensore per la misura di parametri atmosferici in ambiente confinato.
Procedura:
Per il rilevamento geometrico del bacino è stato impiegato un APR Phantom DJI 3 adottando una quota di volo di circa 40 metri rispetto al fondo dello bacino stesso. Le immagini fotografiche sono state acquisite con fotocamera in assetto nadirale imponendo un ricoprimento longitudinale dell’80% circa e laterale del 60%. Il volo non è stato eseguito in modalità automatica per evitare l’effetto delle grandi masse metalliche presenti nel cantiere sui sensori di bordo del drone. Sono state inoltre effettuate numerose riprese delle pareti laterali da drone con asse di presa in posizione inclinata e da terra con fotocamera reflex ad alta risoluzione.
Dati di rilievo:
Complessivamente sono stati acquisiti 263 fotogrammi da drone e 72 da terra.
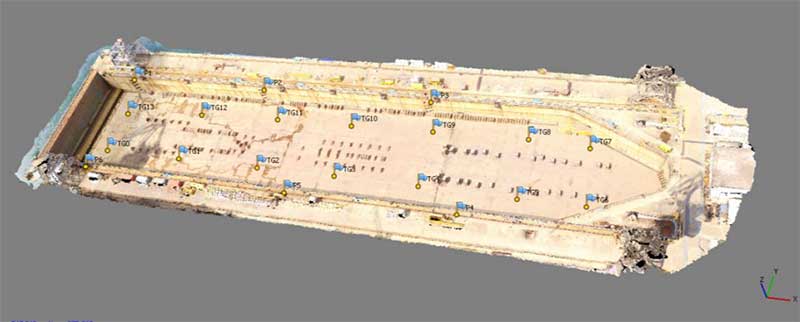
Contemporaneamente al volo fotogrammetrico è stato effettuato il rilevamento topografico di 13 targets disposti sul fondo del bacino secondo una griglia regolare. Le misure sono state eseguite con una stazione totale Geomax di alta precisione. Con la stessa tecnica sono state rilevate anche le posizioni di 6 punti naturali significativi delle pareti del bacino. Targets e punti naturali sono stati utilizzati come Ground control points in fase di restituzione fotogrammetrica.
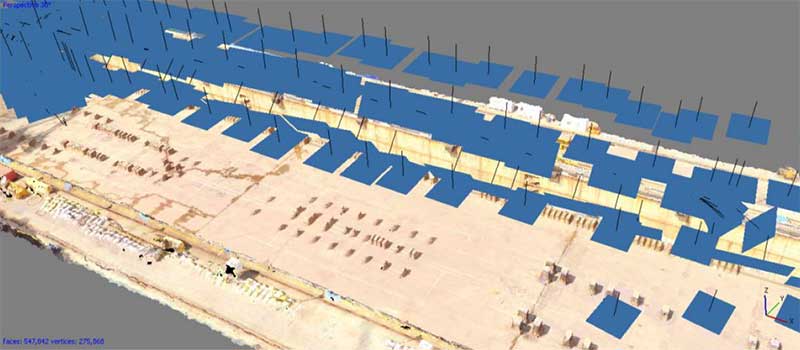
Fase di restituzione
La restituzione fotogrammetrica è stata operata con il software Agisoft Photoscan del Dipartimento di Ingegneria. Le fasi del processo comprendono innanzi tutto l’orientamento in blocco di tutte le immagini nel sistema di riferimento materializzato dai target e la relativa analisi dei residui di orientamento. Nel nostro caso i residui di orientamento, indicativi della precisione del rilievo, sono risultati non superiori a 2 cm in planimetria e a 4 cm in quota. Successivamente si è proceduto con la elaborazione della cosiddetta “points cloud” comprendente tutti i punti dell’oggetto del rilievo di cui il programma riesce a determinare le coordinate 3D. Dopo l’eliminazione dei punti non appartenenti all’oggetto stesso è stato infine creato il modello poligonale e il modello texturizzato.
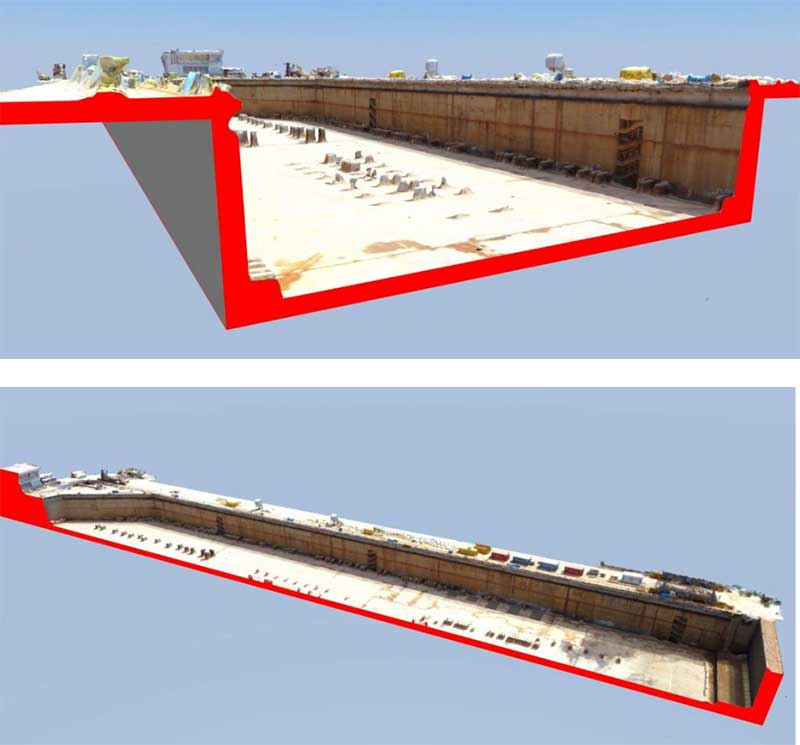
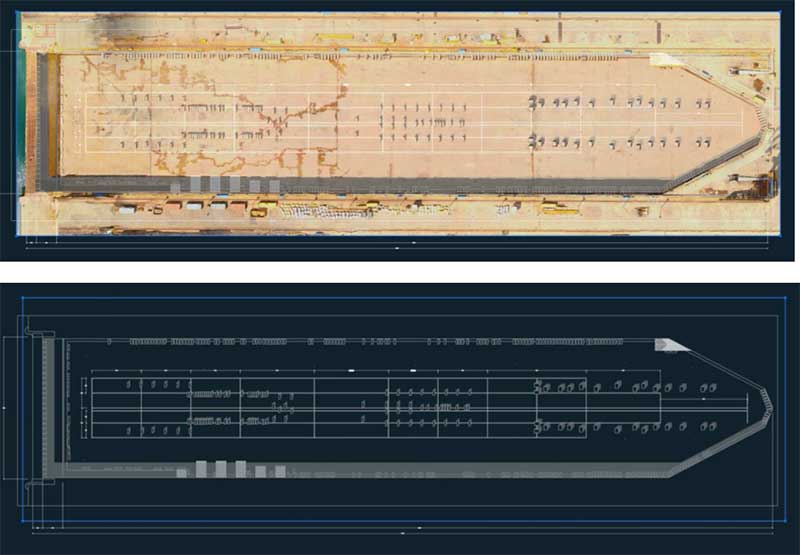
Il modello 3D così ottenuto è metricamente corretto e regolarmente orientato nel sistema di riferimento locale. Utilizzando opportuni software di computer grafica è possibile effettuare misure sul modello, determinando i corrispondenti valori nella realtà. Inoltre si possono ottenere ortofoto, sezioni con piani inclinati in modo qualsiasi e rappresentazioni assonometriche e prospettiche.
Le altre sperimentazioni
Seguendo il programma stabilito, dopo il rilevamento fotogrammetrico sono stati eseguiti due voli con un drone realizzato per conto dell’Università di Ferrara e un INSPIRE DJI. Con il primo sono state eseguite delle videoriprese di dettaglio di una delle gru poste sui bordi del bacino. Con il secondo, dotato di una videocamera di alta qualità, sono state realizzate delle video riprese panoramiche e di dettaglio del bacino, della barca porta e delle installazioni circostanti.

Il nostro Hydrone
Infine è stato sperimentato il drone equipaggiato con un dispositivo per il prelievo di acqua marina. In particolare il drone è stato fatto decollare dalla banchina in prossimità della barca porta, è stato portato ad alcune decine di metri da riva, in mare aperto, ed è stato posto in posizione stabile ad alcuni metri sulla superficie del mare. A quel punto un micro verricello ha calato un contenitore zavorrato che si è immerso in acqua. Una volta riempito, il contenitore è stato recuperato a bordo del drone che rapidamente è ritornato alla base.
E’ POSSIBILE VEDERE IL VIDEO DELLA SPERIMENTAZIONE DELL’HYDRONE CLICCANDO QUI
